仿生机器鱼实验平台属于教育部和北京邮电大学共同出资支持的一项“大学生创新性实验计划”项目,是一个集光、机、电、流体、智能于一体的实验平台,研究内容包括:仿生机器鱼机械结构的研究,推荐效率的研究以及控制性能的研究。
1. 仿生机器鱼平台简介:
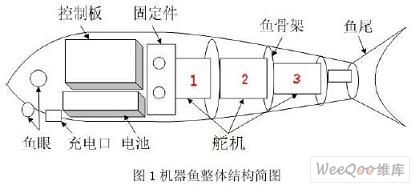
设计制作的机器鱼模仿鲹科鱼类的外形,头部采用刚性结构的塑料材料。其形状采用流线型,模仿真鱼鱼头的形状和大小比例。在鱼头的内部空间里安装电源及控制电路,并在鱼头两侧鱼眼处及在头前部的偏下侧安装了3 个红外传感器,构成了一个探测左、前、右三个方向的传感器网络,让鱼具有自助避障的功能。
使用铝合金制作的鱼骨架把三个舵机串联起来,鱼骨架支撑起套于舵机外面的橡胶鱼皮,便构成了了机器鱼的鱼身这个三关节的驱动系统。使用铝合金制作的连接件将鱼身通过螺纹连接的方式固定在在刚性鱼头上,鱼身的橡胶鱼皮使用热熔胶粘在鱼头上,这样便构成了机器鱼的整体结果。具体如图1 所示。实验证明,这种方法简单易行,且方便拆卸和组装。
机器鱼技术指标:巡游速度:1.2~1.5m./s;全电量巡游距离:4.5~5.5 千米;转弯半径:15~20cm。
2.系统组成及工作原理:
从功能上看,整个鱼体的系统可以分成三大块,分别是:感知区,决策区,行为区。感知区对应着多红外传感器网络和无限传输模块,而决策区指的是主控芯片(MCU),动作区对应着舵机串联组成的三关节驱动系统。具体如图2所示。本系统的重要的工作集中在对多舵机的协调控制,因此主要围绕舵机的控制工作进行细致详尽的介绍。

3 舵机的控制
3.1 舵机的工作原理:
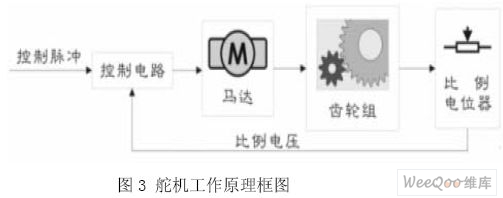
舵机主要由以下几个部分组成:舵盘、减速齿轮组、比例电位器(位置反馈电位计)、直流电机(马达)、控制电路板等。其工作原理:控制电路板接受来自信号线的控制信号,控制直流电机转动,直流电机带动一系列齿轮组,其齿轮组的输出轴与一个线性的比例电位器相连,该电位器把输出轴转过的角度θ 转换成比例的电压反馈给控制电路,控制电路将其与输入的控制脉冲信号比较,产生纠偏脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使舵机定位的目的。舵机是一个典型闭环反馈系统,其工作原理由图3 所示。
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这两根线给舵机提供基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,另外一根线是控制信号线,一般为白色。
3.2 单舵机和多舵机的角度控制
3.2.1 单舵机的角度控制:
由舵机的工作原理可知,给舵机输入一个周期在20ms 左右,脉冲宽度在0.5ms 至2.5ms 之间的周期性脉冲信号,驱动舵机输出轴达到-90°到90° 之间的转角,呈线性变化。并且无论外界转矩怎样改变,舵机的输出轴都会保持在一个相对应的角度上,直到给它提供一个另外宽度的脉冲信号,才会改变输出角度到新的对应的位置上。通过编程,借助单片机的输出端口得到需要的周期性脉冲信号。
程序示例:(晶振为:4MHZ,脉冲从PORTDbits.RD0 输出)

从上面的程序可知,通过改变delay 函数的形参j,可以根据需要,得到具有相应脉冲宽度和周期的脉冲信号。例如,改变以上程序段的1 至4 行为:
得到输出脉冲宽度为1ms,周期为20ms 的脉冲信号,然后借助for 循环,将能得到所需要的周期性脉冲信号,驱动舵机输出轴达到-90°到90° 之间的转角。
3.2.2 多舵机不同角度的控制:
通过多舵机不同角度的控制,可以控制几个舵机同时向不同角度扭转,以达到预期的控制目的。
具体的实现方法是:在定时器延时函数中设定一个计时值t(在程序中t 在初始化时值为0),使t 在每次定时器计时完毕时加1。例如,定时器一周期的定时时间为0.25ms,则t值每加1 就相当于0.25ms。当t 的代表值达到20ms 也就是当t 等于80 时清零,这样就可以将脉冲周期控制在20ms,再通过使用if 语句查询方式,可以调节同一周期脉冲的脉冲宽度,即能使多舵机同时向不同角度旋转。
程序示例:(晶振为:4MHZ,脉冲从PORTDbits.RD0,PORTDbits.RD1,PORTDbits.RD2三个端口中输出)

通过以上程序再配合for 循环,便能在PORTDbits.RD0,PORTDbits.RD1,PORTDbits.RD2三个端口得到脉冲宽度分别为1ms,1.5ms,2ms,周期同为20ms 的三种周期脉冲信号,从而达到对三个舵机同时进行不同控制的要求。当然利用以上的方法,可以很轻松地对3 个以上的多个舵机同时进行控制。
3.3 舵机的速度控制
通过舵机的特性可以了解到舵机的瞬时运动速度是由其内部的直流电动机和变速齿轮组的配合来决定的,在恒定的电压驱动下,其数值是恒定的。但舵机的平均运动速度可通过分段停顿的控制方式来改变,例如,把动作幅度为90°的转动细分为128 个停顿点,通过控制每个停顿点的时间长短来实现0°到90°变化的平均速度。也就是说,将90 度的连贯一步转动变为128 个停顿的步进转动,通过每步之间的短暂停顿可实现减速的目的,因为停顿时间非常短因此可看做是90°的连贯转动,由于篇幅的限制,这里不再给出相应的程序实例,感兴趣的读者可以自己参考上面的程序实例进行编写。
4.结束语
本文介绍的这种方法产生的PWM 波形高,能够很好的完成舵机的控制工作,舵机工作稳定,我们设计制作的机器鱼成功地实现了鱼类的一些基本运动动作,如前游,加速,停止,前进中转弯等,这也验证了所采用的多关节驱动方式和对多舵机的控制方法是行之有效的。本文通过以仿生机器鱼为载体进行撰文,意在抛砖引玉,希望对其它的舵机控制应用起到帮助。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。