本地互连网络(LIN)作为低成本车载网络的方案已得到认可,尤其是用在包括空调、汽车门锁以及车镜控制装置在内的汽车车身及舒适系统中。总线通信结构简单,数据传输速率相对较低,这就意味着LIN功能可适用于大多数汽车模块,而且几乎不会对空间和成本造成任何影响。
基本的LIN网络由一个主节点和数个从节点组成,通过能够产生有线“与”功能的单条通信线互联。通信速率高达19.2Kbps,采用两种被称为“隐性”和“显性”的电气状态传输信号,这两种状态分别代表逻辑1和0。当总线上所有发送器均处于被动状态时,由于主节点中1k(上拉电阻的作用,总线电压始终保持在接近电池供电电压。当发送器主动将总线电压拉向地电位时,就会出现“显性”状态。
不过,即便是这样一个简单的设置,却给设计人员提出了各种挑战,特别是在节点寻址和故障检测方面。在正常模式的通信开始前,每个节点在启动或重置时都被分配了一个的地址。这主要通过以下两种方式之一来实现:通过从节点的硬连线、对OTP位进行编程、专用连接器或DIP开关设置来实现;或者通过被称为从节点位置检测(SNPD)的自动寻址方式来实现,在该过程中由主节点在上电时分配节点地址。
硬连线或手动编程技术指的是配置一个系统或替换一个故障节点时,或者需要人工干预,或者需要依赖于提供大量具有不同LIN地址的节点。
自动寻址则相反,它指的是具有相同功能的模块可连接到LIN网络上,而无需区分它们的地址。
该过程根据节点在总线上的位置为各个节点分配地址。因此,自动节点位置检测是自动寻址不可分割的一部分,这两个术语(即节点位置检测和自动寻址)有时是可以互换的。
在基本LIN系统(图1)中使用的有线“与”连接指的是所有节点均无法确定其在总线上相对于其它节点的位置。各总线连接方式在电性能上都是等效的。为了实现节点位置检测并采用此方法进行自动寻址,必须采取其它措施确保每个节点都有可能在总线上确定其相对位置。

实现这一目标的一种方法就是:在各节点处将LIN线路隔离开,以便节点的物理层可以在节点分出的两个总线部分之间通过电性能加以辨别(图2)。每个节点上有两个LIN连接,所有的节点均通过“菊花链”连接起来。每个从节点中均包括一个检测电阻(通常为1Ω)和电流源(通常为2mA):距主节点远的从节点和总线之间只有一条单独的连接(即没有节点“下行”),没有其它电流存在,因此可以由主节点进行识别并分配地址。一旦该从节点分配到地址,就可以通过终止其电流源来停止参与位置检测过程。因此,总线上“下一个”从节点当前就是以该链路上“一个”节点的形式出现。该过程不断继续,直到所有节点都分配到各自的地址为止。

该技术的难点之一在于:在一个极易受电磁兼容性(EMC)以及其它电气干扰的汽车环境里,需要相当的电流测量。由于各种干扰会导致位置检测产生错误,因而该过程可能会相当耗时;而且该过程还需要一个主、从节点互连的固定拓扑结构作为单独而无分支的线性总线(主节点位于一端)。,如有任何故障,该系统在故障节点的位置就无法传递任何信息。
通过采用安森美半导体公司(如图3所示)提出的另一操作方法,这些问题均可迎刃而解。即仍然采用相同的通用原理,但是每个节点都含有一个高压(HV)开关,从而允许从节点传送或阻止总线两个部分之间的通信。
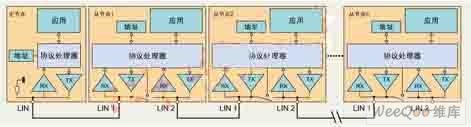
图3:安森美半导体的解决方案在每个节点都含有一个高压(HV)开关,从而允许从节点传送或阻止总线两个部分之间的通信。

分配地址(如图4所示)的过程始于启动或重置阶段,即当从节点进入初始状态时,此时高压开关处于开启状态。LIN总线的所有部分均被分隔开,只有与主节点直接相连的从节点才会对来自主节点的LIN信息头做出反应。主节点发送初始化命令后,上述从节点获得地址并关闭其通往总线下一部分的高压开关。这使得第二个从节点可以和主节点进行联络,以便依次获取其地址。该过程如此继续下去,直到所有节点都获得各自的地址为止。

实际上,基于开关的系统在遵循上概基本原理的同时,通常要将开关功能从外部电子节点LIN1和LIN2移入收发器的低压部分(如图5所示)。实际上,每个从节点都包含了一个完整LIN收发器的两种情况。信息流的传播或阻止都是通过对发往各个发送器和来自各个接收器的逻辑信号进行控制而实现的。这免除了安装能经受汽车系统中严苛环境条件(尤其是脉冲干扰、系统ESD和EMC)的开关的需求,且提高了可靠性。
在正常操作期间,为保证各电线部分在逻辑上表现为一根单独的总线,每个从节点上发送器和接收器的逻辑互连电路必须确保总线信号双向正确传送。在其中一个LIN连接引脚上接收到的数据必须被发送至其它引脚,反之亦然。因此,数字模块实际上起到了中继系统的作用。

该设计对度的要求确保了系统时序的正确性(如图6所示)。当其中一个LIN互连引脚接收到显性状态时,必须立即向其它LIN引脚重复发送,并进而发送到菊花链上。但是,当初始显性状态结束,中继机制在将这种变化沿菊花链传递时不可避免地会有轻微的时间延迟。这样一来,持续的显性状态自身可被传回网络的初始启动部分,导致两条总线将保持显性的互锁状态。因此,必须引入额外延时概念,在此期间,总线状态被视为不能够有效重复。这种延时必须能够涵盖中继系统差情况下的总延时。额外延时的逻辑实现被称为反馈抑制。当然,同样的论点双向适用。因而,包含反馈抑制的中继器功能相对于两个LIN连接是完全对称的。
除了采取措施避免互锁之外,设计工程师还必须确保信号传送延时问题在系统中得到解决。采用中继器会不可避免地引入时间延迟,这是因为每个信号首先必须被正确地接收,然后才能被再次发送。由于每个从节点都包含一个中继器,因此整条总线上的总信号延迟必须被视为总线各个部分的所有部分延迟之和。在设计该系统的LIN进度表时,就必须考虑总信号延时。但是,通过计算和仿真表明,对于所有的LIN应用来说,这种延时的影响是可以接受的。
采用双中继器连接和寻址的方法能够克服基本LIN系统的许多局限性。尤其是,它允许主节点对故障从节点进行定位,这是因为一旦地址分配成功,主节点马上就可以收到反馈。此外,节点位置检测是基于正常信号电平的信息交流进行的,这就意味着自动寻址过程的可靠性和正常模式通信一样高。
这项技术的另一个优势是设计简单。在同一节点中仅需使用基本LIN收发器两次,并能够实现完全的数字互连。相反,电流测量方法要求设计具有较的电压测量电路,以便实现在恶劣条件下的工作。因此,双LIN节点在设计上更加便单快捷,从而减少了开发成本和风险。
此外,除了主节点在一端的单条线性总线外,还有可能部署其它拓扑结构。例如,树状拓扑结构可通过将每个双LIN节点连接到树状结构(如图7所示)中的两个分支点来实现。由于自动寻址过程仍然能够区分出节点与哪个分支连接,因此能够实现正确的节点位置检测。同样,实现诸如环状和嵌套环状等其它复杂拓扑结构也是有可能的。

图7:树状拓扑结构可通过将每个双LIN节点连接到树状结构中的两个分支点来实现。
双LIN节点位置检测方法完全符合LIN规范。此外,它还可实现同时采用标准LIN节点和双LIN节点的混合拓扑结构,这在许多非线性拓扑结构中也是常见的情况。
这些技术极大地提高了LIN总线型架构的性能,使之能够不断满足汽车系统设计人员的需求。通过利用正常信号电平,双节点自动寻址系统能够确保可靠性,同时提升容错水平,并具有更快识别和纠错能力。与现有电流测量技术不同的是,它不需要精密的模拟元件和测量方法,因此可简化设计工作,风险也比较低,从而加快上市时间,并提高了成本效益。,使用该方法不受线性总线技术的束缚,这使得设计人员能够部署适合于应用的拓扑结构。(安森美半导体公司)
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。