摘 要: 采用环形线圈车流检测器检测道路流量,由微型计算机自动判定道路交通状态并动态调整红绿灯切换时间,并通过GPRS模块自动发布路况信息,可以有效解决传统方法低效、数据不可靠或没有统计数据的缺点。该方法利用国内道路上已经广泛使用的环形线圈,大大降低升级成本,具有良好的应用前景。
国内当前的道路流量检测主要通过设立路况通信员的方法来实现。广播电台通过在城市主干道附近设置或临时招聘若干人员,随时路况消息。这种方法低效、滞后严重、数据不可靠或没有统计数据,不足以向城市管理部门提供决策参考信息。采用价格低廉、运行可靠,可实时动态控制红绿灯系统的自动化道路监测及消息发布系统必将成为城市管理者关心的重要问题之一。为此,本文提出一种基于GPRS模块的路况实时信息发布系统,该系统可通过GPRS模块对外发布道路流量信息,并克服原有道路信息发布系统低效、准确性低、滞后严重等缺点。
1 总体设计方案
总体设计方案如图1所示。4个环形线圈车辆检测器分别安装在十字路口的4个方向,当有车辆经过环形线圈车辆检测器时,产生高电平信号,该信号馈送至控制器。控制器对该信息进行计数、处理,并实时控制红绿灯切换的时间,将道路调整到通行状态;同时控制器通过SIM300构成的GPRS模块将计算得到的相关数据传送至控制中心及相关部门。控制中心可根据具体情况向社会公布,同时也可以向控制器发送指令,进行人工干预。该系统具有实时性高、客观、准确的优点,同时也可以降低交管部门的劳动强度。

2 基于GPRS的短信收发平台的硬件设计
2.1 环形线圈检测器
环形线圈车辆检测器以几匝金属线绕制而成的环形线圈为传感器,埋设在道路上。环形线圈作为检测器调谐电路中的一个电感元件,与车辆检测器的振荡回路一起形成LC谐振,当车辆通过时,也就是线圈中间或周围有铁制品存在时,由于铁磁材料的高导磁率,将会使线圈中单位电流产生的磁通链剧增,从而导致线圈电感值发生微小变化,进而改变LC谐振的频率,由此检测车辆通过与否。目前国内部分路段已经埋设了环形线圈作为摄像头的启动信号源。使用这种方式可以降低前期投入。
2.2 控制器设计
控制器采用ST公司的STR710作为中央处理单元。STR710具有14个外部中断输入,256 KB程序Flash存储器,64 KB内部RAM,5个定时器,比较适合应用在有多个外部中断源需要处理的场合。控制器电路框图如图2所示。P2.5通过光耦连接到MAX485的DI端,控制红绿灯的转换;P2.4通过光耦连接到MAX485的DE端,使能MAX485发送功能。

图2 控制器电路
2.3 GPRS模块设计
GPRS模块由SIM300接口电路、电源、SIM卡接口电路和开机电路组成,如图3所示。

图3 GPRS 模块框图
2.3.1 电源
SIM300的VBAT电源管脚电压范围3.4~4.5 V,模块在发送数据时电流消耗较大,峰值电流可能达到2 A,所以电源一定要能够提供2 A以上的电流。电源对模块非常重要,一旦在电源上产生扰动、干扰,都可能造成模块的死机。设计时应选择输出电流大于2 A的稳压电路,如LM2576等。
2.3.2 SIM300接口电路
SIM300接口电路如图4所示。其中21、23、25脚需要接22 Ω匹配电阻,TXD和RXD连接到控制器的RX1和TX1。

图4 SIM300 接口电路
2.3.3 SIM卡座接口电路
SIM卡接口电路如图5所示。若采用6脚SIM卡,第8脚可以悬空。

图5 SIM 卡接口电路
2.3.4 开机电路
SIM300在PWRKEY引脚为低,且持续时间不小于1 500 ms时启动。开机电路如图6所示。
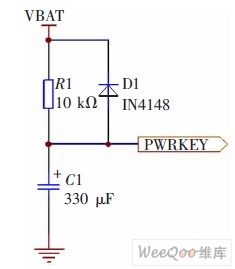
图6 开机电路
3 基于GPRS的短信收发平台的软件设计
3.1 算法原理
设t0为起始时间,检测器以时间T为周期检测时间段Si中的车辆的流量Q(Si)和道路占有率C(Si)。其中:
式中 为一周期中车辆处于线圈上的时间。
为一周期中车辆处于线圈上的时间。
定义流量相对增量
 和占有率相对增量
和占有率相对增量 。如图7所示,在实际使用时同时在道路的上游A和下游B安装检测器。定义上下游平均占有率差
。如图7所示,在实际使用时同时在道路的上游A和下游B安装检测器。定义上下游平均占有率差 ,上下游平均占有率相对差
,上下游平均占有率相对差 。上下游检测器之间的路段发生交通拥护的必要条件是:
。上下游检测器之间的路段发生交通拥护的必要条件是:
(1)若上游的检测器A检测出的流量的相对增量小于占有率的相对增量,则认为下游路段在本周期或下几个周期内有可能发生交通拥挤。
(2)在条件(1)基础上,上游与下游检测器的车辆平均占有率差大于某一阈值α,上游与下游检测器的平均占有率相对差大于某一阈值β时,判定有交通拥挤事件发生。其中α、β与道路的实际设计容量有关。
(3)若上游与下游检测器的车辆平均占有率差小于或等于某一阈值α,上游与下游检测器的平均占有率相对差大于某一阈值β时,判定交通拥挤处于消散过程。

图7 检测器安装位置
3.2 控制器软件设计
控制器软件由主程序、指令处理、中断处理、短信发送、拥堵判定和红绿灯控制模块组成。
3.2.1 主程序
主程序根据中断程序返回的状态循环调用拥堵判定和红绿灯控制模块,在拥堵发生前调整红绿灯切换时间,以便缓解交通拥堵状况,同时向控制中心发送信息,由控制中心发布路况信息,减少后续的车流。在发生拥堵时也可以在时间通知控制中心,以便采取进一步措施。在有控制中心指令时调用指令处理模块。主程序框图如图8所示。

图8 主程序框图
3.2.2 拥堵判定
拥堵判定按照3.1的描述设计。流程图如图9所示。

图9 拥堵判定框图
3.2.3 中断处理
中断处理模块用于获取检测器信息和控制中心指令,为减少中断处理时间,提高系统的响应速度,中断处理模块仅作初步处理,绝大部分工作交给主程序执行。
3.2.4 短信发送
短信发送用于将道路信息发送到控制中心或者在路况恶化时请求控制中心人工干预。
根据交通拥挤和消散过程的特征,给出了利用微机技术自动判定道路交通状况的算法,并试图在此基础上实时地控制红绿灯的变换周期,实现无人工干预情况下改善交通状况,同时将路况实时信息发送到控制中心,控制中心可以根据实际情况向社会发布,并在特殊情况下进行人工干预。该系统具有高效、实时、客观的特点,且简单易于实现,具有良好的应用前景。
[1]. GPRS datasheet https://www.dzsc.com/datasheet/GPRS_1594650.html.
[2]. SIM300 datasheet https://www.dzsc.com/datasheet/SIM300_1135859.html.
[3]. MAX485 datasheet https://www.dzsc.com/datasheet/MAX485_859396.html.
[4]. LM2576 datasheet https://www.dzsc.com/datasheet/LM2576_1081686.html.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。