摘 要: 分析了多级维纳滤波器的工作原理和改进方法,引入一种可靠的秩选方法,得到了一种稳妥的多级维纳滤波实现方式。与传统方式相比,引入本秩选方向后的算法很容易找到一个门限,使得输出SINR达到。对算法有限模型的抗干扰性能进行了仿真试验,试验结果证明,该算法模型能消除多个干扰,并且经过抗干扰滤波的信号未受损伤。
通常,GPS信号抗干扰的研究方法有时频域抗干扰、利用GPS信号循环平稳特性抗干扰、阵列抗干扰以及空时抗干扰。空时联合处理具有在空时二维域剔除干扰的能力。设空时二维阵列阵元数为M,时间延迟数为N,则接收数据X(k)为MN-1维矢量,其处理的运算量约为O(MN3),随着空时处理维数的增加,运算量成立方倍增长,大运算量对计算资源消耗以及计算时长来说都是不可接受的,因此降维处理是实际应用的必然选择。多级维纳滤波器MWF(Multistage Weiner Filter)能够快速收敛,对多级维纳滤波器作D级截断(D<MN),即为降维维纳滤波器,D即为多级维纳滤波器的迭代次数。
参考文献[1]给出了MWF的基本原理;参考文献[2-3]对MWF提出了改进方法,可以用较低的计算量实现。降维维纳滤波器一个关键的问题就是确定滤波器的维数,通常是通过检测每步运算后所产生的均方误差的变化确定;本文利用接收信号在每步迭代之后能量的变化情况来确定滤波器的维数。仿真说明了经过改进的多级维纳滤波算法能够准确确定迭代次数,得到的输出信干噪比。通过理论模型和有限模型的仿真证明了所设计的基于多级维纳滤波的抗干扰滤波器具有较好的抗干扰性能。
1 算法原理和步骤
1.1 多级维纳滤波基本原理
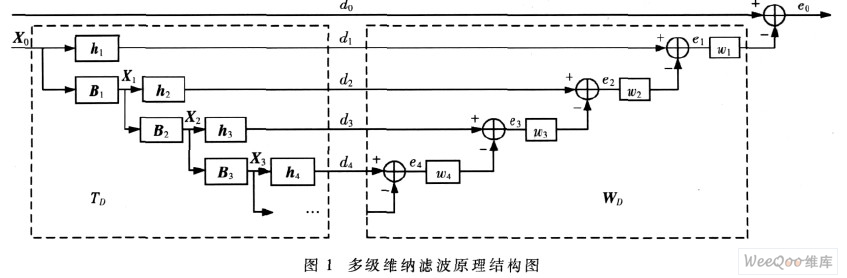
接收数据X(k) 经过满秩线性预处理, 得到d0(k)=S×X(k),X0 (k)=X(k)-Sd0 (k), 其中S 为空时二维导向矢量,阻塞矩阵B0=mull(S), 这样就转化为了经典维纳滤波的问题。随后应用多级维纳滤波的方法逐级对观测数据进行分解。其原理结构框图如图1 所示。
每步的hi为前一步上下两支路的归一化互相关, 表达式为 为与hi正交的[MN×(MN-1)] 维矩阵, 称为阻塞矩阵, 其列矢量构成hi的零空间, 即
为与hi正交的[MN×(MN-1)] 维矩阵, 称为阻塞矩阵, 其列矢量构成hi的零空间, 即 每步的互相关操作尽可能保留了前一步中的信息, 阻塞矩阵Bi保证每个降维分量间的正交性。通过多级分解, 终所得均方误差与直接形式的维纳滤波相同。实际上, 往往仅需要D 步分解(D<MN)就可以得到几乎所有有用信息。多级维纳滤波器由分析滤波器和综合滤波器组成。
每步的互相关操作尽可能保留了前一步中的信息, 阻塞矩阵Bi保证每个降维分量间的正交性。通过多级分解, 终所得均方误差与直接形式的维纳滤波相同。实际上, 往往仅需要D 步分解(D<MN)就可以得到几乎所有有用信息。多级维纳滤波器由分析滤波器和综合滤波器组成。
分析滤波器构成一个降维矩阵, 设为TD。综合滤波器由标量维纳滤波器的嵌套链组成, 对降维后的数据矢量计算权值WD。其中降维矩阵TD的表示式为:

逐级反推得到标量维纳权序列:

总的权为:

多级维纳滤波器的分析滤波器和综合滤波器是迭代计算过程, 迭代次数等于降维矩阵的秩, 所以也将滤波器迭代次数的确定称为秩选, 若迭代次数为D, 则降维过程中把MN-1 维的接收信号矢量映射成了D 维的矢量,这样便压缩了滤波过程的运算量。
1.2 多级维纳滤波器的改进

通常多级维纳滤波器的迭代次数需要在后向迭代过程中确定,即图1中的右虚线框,检测每步迭代后ei的变化,当小于一个预设的门限值时停止迭代,可称为均方误差检测法。实际上接收信号功率在算法迭代过程中也是收敛的,通过检测这一变化值也可以确定迭代次数,下面的实验还将证明这种方法更好。通过检测接收信号功率变化来确定迭代次数,需要计算每步迭代后接收信号功率为:




2 抗干扰功能仿真
仿真采用4元加芯圆阵,圆阵半径d=?姿/2,?姿为接收信号波长,信号入射范围:方向角0°~360°,俯仰角0°~90°;期望卫星信号入射角为(0°,30°),其中方向角在前,俯仰角在后,以下入射角均照此排列。根据参考文献[5]可知,地球表面接收的GPS信号功率约为-158 dBW, 接收机热噪声密度为10lg(kT0)=-204 dBW/Hz,其中k=1.38×10-23(watt-sec/K)为波耳兹曼常数,T0=290 K为常温,仿真采用C/A码,接收机处理带宽约为5 MHz,可以算得接收机热噪声功率约为-137 dBW,因此无干扰情况下的信噪比为-21 dB。干扰全部按照干噪比30 dB设置,功率即为-107 dBW。
仿真1. 不同秩选方式对算法抗干扰性能的影响。
通过试验确定合适的秩选方法,并根据实验结果确定门限以找出的多级维纳滤波器迭代次数。干扰场景设置:两个功率相同的宽带干扰,两个干扰的来向角为(80°,45°)、(130°,45°)。
首先用仿真试验说明两个问题:(1)多级维纳滤波器做抗干扰滤波时存在一个迭代次数;(2)通过检测接收信号功率的变化比检测均方误差更容易设定准确门限。仿真图如图2所示。

从图2(a)可以明显看出,SINR随迭代次数的变化情况显而易见,当迭代次数为10的时候输出SINR,随后SINR会降低。如图2(b)所示接收信号和MSE功率均用数值表示,点划线、星划线分别表示接收信号MSE的功率,实线是一个功率门限,为-137 dBW,当被检测的各步迭代后的接收信号和MSE功率小于这个门停止迭代,以接收信号功率变化为依据,所确定的迭代次数为10;以MSE变化为依据,则所确定的迭代次数为8,不是迭代次数。从图中可以看出,用接收信号功率的变化来确定迭代次数时,门限的选择范围较大,可以从-144 dBW~-129 dBW;而用MSE变化来确定迭代次数,门限的选择范围很小。
然后以输出SINR衡量抗干扰性能。分为两种情况做仿真:(1)在对迭代过程进行秩选时,检测每步迭代后MSE的变化,当MSE小于所设定的门停止迭代;(2)检测接收信号功率的变化,将其与所设定的门限相比较确定迭代次数。每种情况下设定10种随机状态,相同随机状态下每次仿真所产生的随机数相同,从而保证了结果对任何仿真公平。每种随机状态下均做4次仿真,将门限分别设为,得到相应情况下的输出SINR,如图3所示。

图3(a)通过检测MSE变化并与预设门限相比较来确定迭代次数,可称之为均方误差检测法,可见只有将门限设为δn2,也即图中对应于实线的threshold1时,不同随机状态下能够获得较稳定的性能;图3(b)检测接收信号功率变化并与预设门限相比较来确定迭代次数,可称之为接收信号功率检测法,只有当门限为8δn2,即图中对应圈划线的threshold4时,不同随机状态下的抗干扰性能会不太稳定。
综合图2 和图3 可得到两个结论:(1) 使用接收信号功率检测法来确定多级维纳滤波器迭代次数的方法更可靠;(2) 在使用接收信号功率检测法时, 判断门限选则在σ2n ~4σ2n范围内均可获得较为稳定的抗干扰性能。
仿真2 理论模型和有限模型在复杂环境中的抗干扰能力试验。
理论模型完全按照算法设计程序,不存在量化和截断问题,通过理论模型能够获得理论结果。有限模型考虑了算法实现的问题,将数据量化,处理过程中有截断,用迭代法实现复杂运算,其抗干扰性能比理论结果稍差。
首先仿真所设计的多级维纳滤波器对抗多个干扰的能力。干扰俯仰角均为45°,方位角设置为:(1)宽带干扰,在仿真过程中依次加入5个干扰,到达方向角为70°、130°、190°、250°、310°;(2)混合干扰,1个宽带干扰到达方向角为70°,依次加入9个单频干扰,到达方向角为100°、130°、160°、190°、220°、250°、280°、310°和340°。仿真理论模型和有限模型下所设计多级维纳滤波器对抗干扰的能力。
图4(a)、4(b)分别表示多级维纳滤波器对抗宽带干扰和混合干扰的能力。图中实线为理论模型的抗干扰输出;星划线为有限情况下的输出SINR。从图中可以得出以下结论:(1)多级维纳滤波器对抗宽带干扰的数目多为(M-1),M为阵元数,本文研究中采取四元阵,所以只能对抗3个宽带干扰;(2)滤波器的理论模型能对抗一个宽带干扰加多个单频干扰,但有限模型在干扰数超过6时相对于理论模型的抗干扰能力有一定下降;(3)在两种场景中有限模型相对于理论模型在输出SINR上均有损失,但在干扰数不多时损失很小。

在干扰基本消除后,对信号进行相关捕获。将抗干扰后的GPS卫星信号与该卫星的伪随机码采样序列做相关运算,理论上在该卫星信号相对于理想零点的延迟处会出现相关峰。假设信号为编号19的卫星所发出,其C/A码的延时为471个码片,本设计中基带信号用5倍C/A码速率采样,则延迟的采样点数为2 355。下面根据图4所显示的抗干扰能力选择两种较为苛刻但又能够完成抗干扰的情况进行仿真:(1)3个宽带干扰;(2)1个宽带干扰加5个单频干扰,对应于图4(b)中干扰数为6的情况。用有限模型进行仿真以贴近真实情况,对抗干扰输出信号进行捕获,捕获结果如图5所示。其中点划线为对抗干扰输出做相关的结果,星划线为理想的伪随机码采样序列做相关的结果。点划线和星划线的相关峰位置左图偏差了一个采样点,右图一致,一个伪随机码片内有5个采样点,偏差一个采样点不至于使得码片位置判断错误。可见接收信号经过抗干扰滤波滤除了干扰,保存了信号。

文章引用一些文献的结论对多级维纳滤波器进行了改进,用一种新的滤波器秩选方式代替了一般方法。文章对算法进行了仿真,证明使用本文中的秩选方式可以准确找到多级维纳滤波器的迭代次数。对算法有限模型进行了仿真,证明模型在不超过理论限的情况下能够对抗多个干扰;对抗干扰输出信号进行成功捕获,说明信号没有发生畸变。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。