空间光通信是以光波作为载波,在空间中进行信息无线传输的一种新型通信技术,其具有保密性高,抗干扰性强,通信速率高等优点,将会在卫星与卫星、卫星与地面控制站的无线通信领域发挥重要的作用,具有广阔的应用前景。但是由于光波波束窄,空间环境又比较复杂,而给通信链路的建立造成了极大的困难,所以对于空间光通信,必须先使用一套捕获、瞄准与跟踪(Acquisition,Pointing and Tracking,APT)系统来建立和维持光通信链路。嵌入式系统具有高性能、低功耗、低成本的优点,使其在运动控制上的应用具有很大优势,以ARM嵌入式处理器为基础的控制系统现在已经得到了广泛应用。针对目前卫星通信终端必须具有高实时性、高集成度、低功耗、体积小和重量轻等一系列特点,提出一种基于ARM 7嵌入式处理器为的APT控制系统。
1 APT控制系统组成
APT控制系统由PWM脉冲控制和产生模块、RS 232串行通信接口模块、光电编码接口模块及人机交互模块组成,系统框图如图1所示。

控制芯片选用Philips公司生产的专用工业控制ARM芯片LPC2124。先由串口接收到由信标光图像处理部分得到的光斑坐标值,通过位置跟踪算法计算出输出,PWM的控制量值,再由PWM产生模块送出PWM脉冲到电机驱动器驱动电机,终带动转台指向目标位置。光电编码器反馈回电机的速度信息到处理器,运用相应的控制算法可以将转台的运行速度稳定在设定值,防止电机因速度不稳定而扰动。在控制过程中,转台的运行状态、速度和位置等信息皆可由LCD显示,转台的运行速度、扫描步长等由键盘输入设定。
2 硬件设计
2.1 LPC2124处理器简介
LPC2124是基于一个支持实时仿真和跟踪的32位ARM7TDMI-S CPU,是世界首款可加密的ARM芯片,并带有256 KWord嵌入的高速FLASH存储器和16 KB的SRAM,完满足系统存储空间的要求,故不需要外加存储扩展,使系统更为简单、可靠。内部具有UART,硬件I2C,SPI,PWM,ADC,定时器和比较捕获单元等众多应用部件,功能十分强大,远远能满足APT控制系统的功能设计要求。3.3 V和1.8 V供电电压可使系统保持低功耗,128位宽度的存储器接口和独特的加速结构可使32位代码在时钟速率下运行,提高了代码运行速度,独特的16位Thumb模式可使代码规模的降低超过30%,而系统的性能损失却很小,提高了代码的运行效率,大大降低了程序的优化难度。特别适用于工业控制、医疗系统和访问控制系统。
2.2 电源电路
LPC2124的内核及片内外设供电电压为1.8 V,I/O口所需电压为3.3 V,而整个数字电路的供电电源为5 V,且通过78M05将电源5 V稳压,故选用了LDO芯片LM1117MPX-3.3和LM1117MPX-1.8稳压输出3.3 V及1.8 V电压,其电路如图2所示。

2.3 RS 232接口模块
通过串口获取光斑的坐标值,由于系统芯片是3.3 V系统,所以使用MAX 3232进行RS 232电平转换,其电路原理图如图3所示。

通过设置LPC2124控制寄存器U0LCR,UODLM和U0DLL来设置工作模式及波特率。
2.4 JTAG接口电路设计
采用ARM公司提出的标准20脚JTAG作为仿真调试接口,JTAG信号的定义及与LPC2124的连接如图4所示。图中,JTAG接口上的信号nRST,nTRST与整个系统的复位电路连接,以达到与控制系统共同复位的目的。

2.5 电机控制及驱动设计
通过设置LPC2124的PWMMR0,PWMMR6寄存器来设置输出PWM的周期及占空比,从而控制转台的运行速度。电机驱动采用DMD402型二相步进电机驱动器,该驱动器可提供整步、半步、8-16档细分共三种运行模式。另外,通过比较捕获单元接收通过光电编码器反馈产生的正交编码信号,经程序处理后得到电机的当前运行速度,再对速度进行调节。
2.6 LCD显示器及键盘设计
利用点阵式液晶显示器实现中文提示界面,增强了人机交互性。设计中采用128×64的点阵LCD,使用内藏T6963C作为控制器。另外,使用4×4矩阵键盘作为用户输入。
3 软件设计
APT控制系统主要由扫描、捕获和跟踪三部分组成,下面是这几部分程序设计的介绍。
3.1 扫描及捕获部分
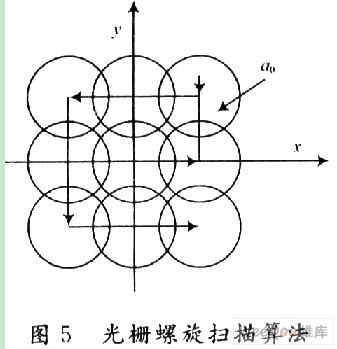
上电复位运行后,程序先完成各部分的初始化工作,显示欢迎界面,并提示用户输入转台运行速度及扫描步长,接着程序开始执行光栅螺旋扫描算法。光栅螺旋扫描算法示意图如图5所示,图中每个小圆代表一个信标扫描子区,每个子区以正方形方式重叠。设每个子区的直径为信标发散角α,则扫描步长为:

以步长α0在不确定区域内搜索目标,直到捕获到信标光斑,然后转入跟踪状态。
3.2 基于增量式PID控制的跟踪算法
PID控制算法包括位置式PID控制算法和增量式PID控制算法。在实时控制系统中常用增量式PID控制算法,其公式为:

式中:△u(k)为输出的控制量;q0=KP;q1=KP(TS/TI);q2=KP(TD/TS)分别为比较项、积分项和差分项的系数;TS为采样时间,对于不同的控制系统,TS各不相同,要根据实际调试经验来确定,该实验中TS为0.15 s。由式(1)可知,只要贮存近的三个误差采样值e(k),e(k-1),e(k-2)就可以计算出△u(k),从而实现位置和速度的反馈控制,完成稳定跟踪。
3.3 系统流程图
由上分析,可得到系统流程图如图6所示。

4 测试结果及结论
经实验测试,整个系统功耗约为20 W,转台转动速度范围为0.2~0.8(°)/s,跟踪按照标准差计算,约达20.69μrad,快响应时间可达200 ms。利用Philips公司生产的ARM芯片LPC2124作为控制来进行设计与开发,从测试结果可以看出,系统功耗较低,基本上满足了APT控制系统的要求,具有较大的实用价值。
[1]. LPC2124 datasheet https://www.dzsc.com/datasheet/LPC2124_844644.html.
[2]. 78M05 datasheet https://www.dzsc.com/datasheet/78M05_100032.html.
[3]. T6963C datasheet https://www.dzsc.com/datasheet/T6963C_635050.html.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。