1引言
电荷耦合器件(CCD.Charge(Couple Device)是20世纪60年代末期出现的新型半导体器件。目前随着CCD器件性能不断提高.在图像传感、尺寸测量及定位测控等领域的应用日益广泛.CCD应用的前端驱动电路成本价格昂贵,而且性能指标受到生产厂家技术和工艺水平的制约.给用户带来很大的不便。CCD驱动器有两种:一种是在脉冲作用下CCD器件输出模拟信号,经后端增益调整电路进行电压或功率放大再送给用户:另一种是在此基础上还包含将其模拟量按一定的输出格式进行数字化的部分,然后将数字信息传输给用户,通常的线阵CCD摄像机就指后者,外加机械扫描装置即可成像。所以根据不同应用领域和技术指标要求.选择不同型号的线阵CCD器件,设计方便灵活的驱动电路与之匹配是CCD应用中的关键技术之一。
本文以TCD1501C型CCD图像传感器为例.介绍了其性能参数及外围驱动电路的设计.驱动时序参数可以通过VHDL程序灵活设置.该电路已成功开发并应用于某型非接触式位置测量产品中。
2 CCD工作原理
CCD是以电荷作为信号,而不同于其他大多数器件是以电流或者电压为信号,其基本功能是信号电荷的产生、存储、传输和检测。当光入射到CCD的光敏面时.CCD首先完成光电转换.即产生与入射光辐射量成线性关系的光电荷。CCD的工作原理是被摄物体反射光线到CCD器件上.CCD根据光的强弱积聚相应的电荷.产生与光电荷量成正比的弱电压信号,经过滤波、放大处理,通过驱动电路输出一个能表示敏感物体光强弱的电信号或标准的视频信号。基于上述将一维光学信息转变为电信息输出的原理,线阵CCD可以实现图像传感和尺寸测量的功能。图1为CCD光谱响应曲线。
3 驱动电路的实现
线阵CCD TCD1501C的主要技术指标如下:像敏单元数为5 000;像元尺寸为7μm×7μm;像元中心距为7μm;像元总长为35 mm;光谱响应范围为400 nm-1000 nm.光谱响应峰值波长为550 nm,灵敏度为10.4 V/lx.s~15.6 V/lx.s。使CCD芯片正常工作的驱动电路主要有两大功能。一是产生CCD工作所需的多路时序脉冲.二是对CCD输出的原始模拟信号进行处理,包括增益放大、差分信号到单端信号的转换.驱动器输出用户所需的模拟或视频信息。
3.1 基于VHDL的驱动时序设计
本部分设计是基于Xilinx公司的CPLD XC9572一PC44-10,在ISE6.1环境下开发实现的。CCD器件需要复杂的三相或四相交叠驱动脉冲,多数面阵CCD都是三相或四相驱动,多数线阵CCD都是二相驱动。本文以二相线阵CCD图像传感器TCD1501C为例,实现了用CPLD完成的驱动电路设计。CCD为容性负载,工作频率高时有一定的功耗,因此需要对CPLD输出的复位脉冲RS、移位脉冲(又称光积分脉冲)SH、箝位脉冲CP、采保脉冲SP,以及二相时钟脉冲中Φ1E、Φ2E等各路驱动脉冲采用74HC14进行整形和驱动能力的放大.然后再送至TCD1501C器件的相应输入端,在CCD的模拟信号输出端将得到信号0S和补偿信号DOS。TCD1501C典型的工作频率是1MHz,该器件具有5 000个有效像元输出。TCDl501C正常工作时要有76个哑像元输出.一个扫描行周期内至少应包含有5 076个时钟脉冲,即TSH>5076×Φ1E 0.1μs,在本设计中TSH=5200×Φ1E。由此可见,改变时钟脉冲频率或增加光积分脉冲周期内的时钟脉冲数,可以改变光积分周期,通常Φ1E的频率设置为可调节的,这样可以根据CCD器件的实际应用环境灵活运用CCD器件的优点以改变光积分时间。只要条件允许,为降低CCD的电荷转移损失率。CCD驱动脉冲的频率应尽可能小。驱动脉冲的频率降低时,可以在示波器上观察到CCD输出信号幅值明显增强。图2所示为CCD工作波形。
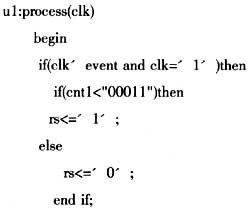
下面是产生时序脉冲的VHDL程序:



3.2基于AD623的CCD输出信号差分驱动设计
CCD在驱动脉冲的作用下,经移位寄存器顺序输出视频信号,复位脉冲RS每复位,CCD输出一个光脉冲信号。由于TCD1501C信号检测采用选通电荷积分器结构。使其视频输出信号中叠加了一些由周期性复位信号RS引起的串扰信号。而且有效信号幅值较小,约为500 mV。直流电压约有4.1V。这是一组典型的共模电压较高、有效差模信号较低的差分信号,信号波形如图3和图4所示。所以模拟信号输出在进行后续处理(包括长线传输、A/D转换等)之前要进行一系列预处理,消除视频信号中的复位脉冲串扰及其他干扰,将微弱的视频信号进行幅值放大及驱动能力的放大。由于是对差分信号的处理,所以先讨论一下差分电路的基本概念。图5为差分信号测量电路里差模和共模电压示意图,VDIFF是信号差模电压,VCM是信号共模电压,信号输出VOUT=R2/R1·VDIFF=G·VDIFF理想状态下,一般差模增益G≥1,而共模增益(%mismatch/100)×G/(G+1)接近于零,因此可以看出共模增益主要是电阻不匹配的函数,在实际测量电路中可能会由于电阻值的微小不匹配而导致两个输入端的共模电压不一致,而使电路的直流共模增益不为零。共模抑制比(CMRR)就是差模增益G与共模增益的比值。用对数形式表示:201g[(100/%mismatch)×(G+1)]。实际工程应用中,电路工作在一个很大的噪声源中.如50 Hz交流
电源线的噪声、设备的
开关噪声、无线信号的传输噪声,这些干扰信号作用在差分输入端,将会在输出端产生一个共模信号,因此差分信号处理除了要求有高的DC CMRR.还要有高的AC CMRR。
在电路设计中选用了ADI公司的
仪器仪表放大器AD623.内部结构原理如图6所示。
在电路设计中选用了ADI公司的仪器仪表放大器AD623.内部结构原理如图6所示。
AD623集成了3路运放.可单电源或双电源工作,具有较高的CMRR和极低的电压漂移,除了一个控制可编程增益的外接电阻外,所有元件都集成在内部,提高了电路温度稳定度和可靠性。应用AD623的CCD模拟信号处理电路如图7。将视频信号及其补偿输出分别送至AD623的反相和同相输入端.在AD623的输出端接射极跟随器以增强信号的驱动能力。选用该器件可消除采用普通运放和外围电阻所引起的输出信号的温度漂移。
4 结束语 基于上述开发的线阵CCD驱动器已调试成功.并且用于某位置测量系统中,工作稳定可靠。本设计方案只要再拓展AD转换部分就可以应用于成像系统的前端。





