摘 要:(CAMC—IP是韩国AXT公司开发的二轴运动控制电路,详细介绍CAMC—IP的主要功能、特点及其内部结构,简要介绍以CAMC—IP为核。的基于PCI总线运动控制卡的设计。
关键词:CAMC一IP;运动控制;PCI总线;应用;设计
1 引言
CAMC—IP是韩国AXT公司生产的一款用于二轴运动控制的电路,它利用脉冲输出改变速度和移动量.可以对步进电机和伺服电机进行的位置控制、速度控制和线性,圆弧插补驱动等;它还具有多轴同步功能,可以利用同步协调控制多个轴;它的中断功能可提高系统的反应性能。另外,它的输入,输出信号均为数字信号,如果是从模拟传感器反馈的信号。则需要通过模,数转换之后再到达该电路的输入端。它的数据总线可以根据实际需要进行选择.可以是8位或16位。
2 内部结构和引脚功能
图1是CAMC—IP的功能结构框图,它包括X轴和Y轴的插补和控制等。该电路内部由主机接口、寄存器组、计数,比较器、脉冲发生器等功能模块组成。其中主机接口主要连接数据信号和控制信号:脉冲发生器则作为脉冲的输出信号源,它的输出有二种:脉冲和方向、PWM信号和参考时钟的二分频脉冲。
图2示出该电路的引脚排列,它共有。128个引脚,封装形式为128QFP。表1列出该电路部分引脚的功能。
3 主要功能和特征
(1)电源电压:+3.3 V;
(2)输入信号的电平:+5 V;
(3)输出的脉冲频率为4.096 Mp/s;
(4)独立的2轴驱动:一块电路可以成功地控制2轴的电机运动,并且功能完全相同;
(5)多种加速/减速控制:每个轴都可以进行S曲线、梯形加速和减速控制,且每个轴加速和减速的速率都可以单独设置;
(6)插补功能:该电路具有线性插补、圆弧插补和位模式插补功能。其中,2轴线性插补和圆弧插补的坐标范围都是一2147 483 647~+2 147 483 647,在整个指定的插补范围内,插补是0.5 LSB;
(7)运行模式:支持10种运行模式,分别为连续运行、信息查询、零点回归、脉冲预设置、传感器检测、线性插补、圆弧插补、位模式插补和MPG运行模式;
(8)多轴同步:该电路具有同步信号输入引脚.当要求多个电路以共同的时序进行同步工作时。可以使该引脚连接同一个输入信号:当没有同步要求时此引脚可以不工作:
(9)限位停止:它对电机的正向,反向运转都有独立停止,减速限制信号,限制停止信号的有效状态可以由软件来设置:
(10)数据的错误判断:通过设置寄存器,如果数据中有错误或者在电机预执行时有错误,电机都会立即停止运转:
(11)过范围检测功能:将内部计数器和外部计数器的差值范围写到过范围检测的数据寄存器中,如果它们之间的差值大于预先设定的范围,那么电机就应该立即停止或者减速运转:
(12)循环计算功能:拥有内部,外部循环计数和两个32位寄存器,用于设定计数范围。该功能可以使计数器在其设定的计数范围内无限制循环计数;
(13)对减速停止工作模式的增强:当电机正在运转时.执行减速停止命令时可以在减速后使电机停止运转.或者使电机恒速运转;
(14)软件限位的设置功能:根据内部/外部计数器的值来设定比较数据,特定的位置可以由软件来限制:
(15)输入,输出信号:每个轴有12个输入信号用于驱动过程中位移和速度的变化,同时也有12个输出信号.输出信号在不同的模式之下具有不同的用途。
4 应用
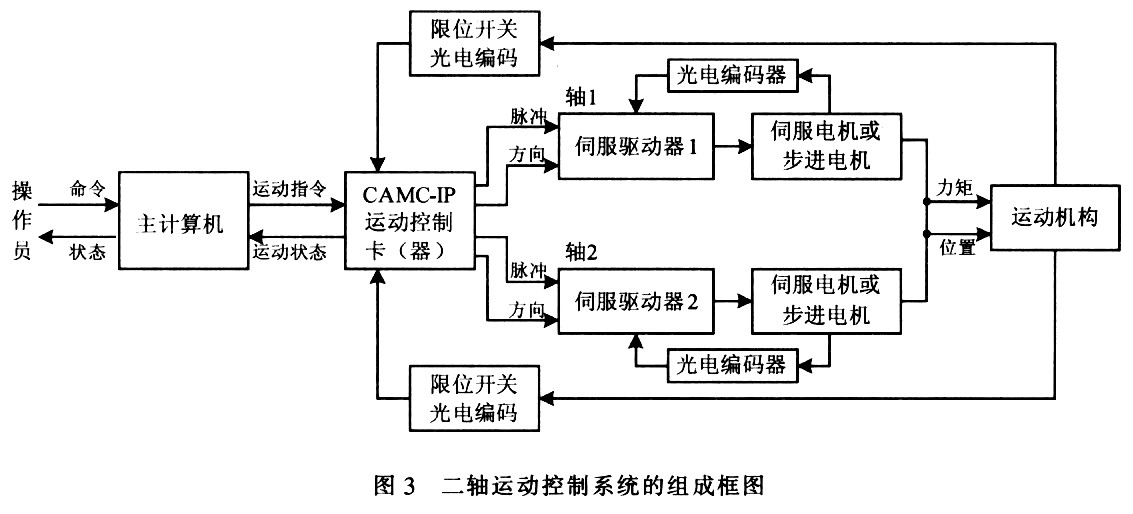
利用该运动控制电路可以设计出高性能和高的运动控制器或者运动控制卡.满足当前先进制造技术的发展。一个完整运动控制系统的结构框图如图3所示.先将控制命令写入计算机,计算机就会发出相应的运动指令给运动控制器,然后运动控制器再将脉冲和方向输出给控制执行机构的驱动器.同时还包括信息的反馈环节,构成一个闭环系统。
运动控制卡的硬件结构框图如图4所示。
它利用。PCI总线实现计算机与控制卡之间的信息传递,其中PCI采用高度综合化的局部总线结构,具有高性能和高吞吐量.并且可同时支持多组外围设备,同时可提供32位或64位数据宽度。这里,笔者采用32位数据宽度,可提供132 MB/s的数据传输率。另外.以运动控制电路CAMC—IP为,每个轴分别由脉冲信号,通用I/O信号及报警、限位等信号来控制。
其中PCI接口模块利用PCI9052型接口电路来完成.它的主要信号有地址、数据多路复用的输入/输出信号、总线命令和字节使能多路复用信号、奇偶校验信号、帧周期信号、主(从)设备准备好信号、停止数据传送信号、初始化设备选择信号、设备选择信号、数据奇偶校验错误信号、系统错误信号、时钟输入信号、复位信号、中断信号和锁定信号。
上位机通过PCI总线把命令写入运动控制电路,运动控制电路接收到上位机的指令后,给驱动器发出控制脉冲来完成各种运动控制。其控制过程可以分为指令控制模式过程和运动参数的读出过程。首先将缓冲参数地址写入运动参数.接着将缓冲的命令地址写入寄存器地址,当所有的运动参数都写入后就可以写入开始运动命令.使电路产生脉冲:首先读出的是运动参数的地址(也就是寄存器地址).然后再读出运动参数值。
5 结束语
先进制造技术的发展对机电设备的运动控制提出了新的要求,要求实现高速度和高的位置伺服或轨迹跟踪控制,以获得控制系统的高和高效率.而运动控制电路在其中充当着主要的作用。本文介绍的CAMC—IP是一款功能强大的运动控制电路.具有良好的二轴控制性能及插补功能。可使整个系统获得较好的工作性能。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。