供应电子指南针传感器SEN-R65 电子指南针模块PNI12927
地区:广东 深圳
认证:
无
图文详情
产品属性
相关推荐
棒式氧化锆氧传感器(氧探头)O2S-T2/O2S-FR-T2详细介绍:
棒式氧化锆氧传感器(氧探头)O2S-T2/O2S-FR-T2
一、产品简介:
氧气传感器采用两个氧化锆盘,在其中间是一个密封空间。其中一个盘起的功能是可逆氧气泵,依次充满样品气和抽空此小空间。另一个盘用于测量氧分压差比率,得到相对应的传感电压。氧化锆盘作为氧气泵运行时,需要的700 °C 的温度由加热元件产生。氧气泵使小空间范围内*额定的*小和*大压力所花的时间和环境中氧分压值具有对应关系。
二、产品特性:
1) 非消耗性的氧化锆传感元件
2) 氧压范围 2 mbar...3 bar
3) 高稳定性和精度,可测量0…100% 氧
4) 对于其他气体无交叉干扰
5) 无需温度稳定
6) 内置加热元件
7) 加热器电压:
O2S-T2:4VDC ± 0.1VDC (1.7A)
O2S-FR-T2:4.35VDC ± 0.1VDC (1.7A)
8) 允许气体温度: -100...400 °C ;
三、产品参数
|
特性 |
*小 |
典型 |
*大 |
单位 |
|
氧压范围 |
2 |
|
3000 |
mbar |
|
精度 |
|
|
5 |
|
|
操作温度 |
|
700 |
|
°C |
|
预热时间(s) |
|
|
100 |
|
|
预热时间(从准备开始s) |
|
|
20 |
四、典型应用:
采暖锅炉的控制;工业生产过程的控制;航空行业飞机机载氧气发生系统的控制;汽车排气的诊断;厂用仪表;*供氧设备;工业烟道;氧含量的检测;燃烧器氧含量检测;制氧机;潜艇氧仓;氧吧;船仓,气调保鲜存储行业的氧气测量;食品包装行业保护气体的检测;发酵工业中剩余氧气的检测;生产过程中的保护气体(焊接、热处理);实验设备;生物技术和*系统中氧气的测试;任何氧气浓缩需要准确测定的场合。
用户可以供氧气;检测环境空气中的氧气用户可以自行开发设计后续控制放大电路,也可使用原装*配套的控制器O2I-Flex
特点
低功耗:3VDC时电流小于100μA
小尺寸:6.0×2.1×2.1mm
大的磁场测量范围:±1100μT(±11Gauss)
高分辨率:0.015μT (0.00015Gauss)
温度范围广:-40° to 85°C
很少的外围元件:11096 ASIC和每个传感器两个电阻
ROHS
应用
手持供电设备中内置罗盘特征
*磁场感知
*固态导航设备:汽车,航海,航空应用
磁物质接近感知
| TTL电子罗盘模块 | SPI电子罗盘模块 | U*电子罗盘模块 | |
| 电子指南针传感器 | 电子指南针模块 |
| 电子指南针、电子罗盘 | |
|
|
|
|
资料下载 |
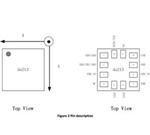
特点 Z轴测量 低功耗:3VDC时,电流< 100μA 小尺寸:3.0×3.0×5.05mm 大的磁场测量范围:±1100μT(±Gauss) 高分辨率:0.015μT(0.00015Gauss) 工作温度范围宽:-40℃ -- +85℃ 外围元件少:PNI ASIC 和两个电阻 表面封装 RoHS 应用 内置罗盘特征的手持电池供电设备 *磁领域感知 *固态导航设备用于航空,航海,航天应用 磁物质接近感知 |
||||
|
资料下载 |
特点 低功耗:3VDC时电流小于100μA 小尺寸:6.0×2.1×2.1mm 大的磁场测量范围:±1100μT(±11Gauss) 高分辨率:0.015μT (0.00015Gauss) 温度范围广:-40° to 85°C 很少的外围元件:11096 ASIC和每个传感器两个电阻 ROHS 应用 手持供电设备中内置罗盘特征 *磁场感知 *固态导航设备:汽车,航海,航空应用 磁物质接近感知 |
||||
|
资料下载 |
特点 完整的2轴磁力计,3VDC时,电流小于1mA 操作电压3VDC 尺寸:7×7×1.35mn 动态范围大 ±1100 µT (±11 Gauss) 高分辨率: 0.060 µT (0.00060 Gauss) 全数字方案,无需附加电路 SPI接口 应用 手持供电设备中内置罗盘特征 *磁场感知 *固态导航设备:汽车,航海,航空应用 应用于需要方位和姿态显示设备中的方向找寻特征中 |
||||
|
资料下载 |
特征 数字接口: SPI 高分辨率: 0.015µT (0.00015 Gauss) 小尺寸: 27.9 × 31 mm 测量范围宽: ± 1100 µT (± 11 Gauss) 采样频率快: 2000 次/秒 低功耗: 3.3VDC时,电流< 1 mA 宽的温度范围: 操作温度 −20 to 70 °C; 存储温度 −40 to 125 °C |
||||
|
资料下载 |
*电流 < 500μA,3VDC < 1μA,理想模式 完整的3轴磁传感器去掉 裸片形式*磁特征 灵活的供电模式:2.2-5V 快速采样模式:*2000采样/秒 全数字接口 |
||||
|
资料下载 |
特点 双轴磁传感器模块 低功耗:3VDC时电流小于500μA 操作电压3.2VDC 尺寸:14×11×2.8mm 大的磁场测量范围:±1100μT(±11Gauss) 高分辨率:0.015μT (0.00015Gauss) 全数字方案,不需要外加电路 数字接口:SPI 应用 手持电池供电设备内置罗盘特征 *磁场感知 *固态导航设备:汽车,航海,航空应用 |
||||
|
资料下载 |
特点 低功耗:3VDC时电流小于2mA 小尺寸:25.4×25.4×11.55mm 高分辨率罗盘航向:0.01 ° *罗盘航向:2 ° 非易失性存储器:当电源变化时,保持标定 多种测量模式:罗盘航向或者磁场 大测量范围: ±1100 µT (±11 Gauss) 高分辨率:0.015μT (0.00015Gauss) 数字接口 应用 *磁场感知 *固态导航 测量设备 机器人系统 车辆探测 消费者市场 *探测 |
||||
|
资料下载 |
TCM-XB是美国PNI*新的*三轴罗盘模块,该模块采用了软硬磁补偿,倾角补偿,全温区温度补偿,用于替代之前的TCM 系列模块, 适合用于声纳浮标,机器人,光学仪器等应用领域. 我们将为您提供PNI公司的优质产品和*技术支持. 航向信息 范围:360° 倾斜 <70°时,精度<0.3°rms 倾斜≤70°时,精度<0.5°rms 分辨率:<0.1° 重复性:0.05°rms 倾斜信息 范围:俯仰±90°横滚±180° 俯仰精度:0.2°rms 横滚精度 俯仰 ≤65° 时,为0.2° 俯仰 ≤80°时,为0.5° 俯仰 ≤86°时,为1.0° 重复性:0.05° 磁场信息 标定磁场范围:±125μT 分辨率:0.05μT 重复性:0.1μT |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 倾斜 <45°时,精度<0.2° 分辨率:0.1° 重复性:±0.05° 倾斜信息 精度:<0.2° 分辨率:0.1° 重复性:±0.05° 高分辨率磁场测量 标定的磁场范围:±85μT 重复性:±0.1°μT 分辨率:±0.05° |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 倾斜 <70°时,精度为0.3° 倾斜 >70°时,精度为0.5° 分辨率:0.1° 重复性:0.05° 倾斜信息 俯仰精度:±0.2° 横滚精度 俯仰 <65o 时,为0.2° 倾斜 <80°时,为0.5° 倾斜 <86°时,为1.0° 分辨率:0.1° 重复性:0.05° 范围 ±90°俯仰 ±180°横滚 低功耗 连续工作模式:7.2mA --11.1 mA 睡眠模式: 85μA -- 220 μA 温度 -40° to +85° C 尺寸:3.33×3.1×1.35cm 高分辨率磁场测量 0.05 μT (0.0005 Gauss) |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 精度为0.8° 分辨率:0.1° 重复性: ±0.1° 倾斜信息 俯仰精度:±0.2° 横滚精度±0.2° 分辨率:0.1° 重复性:±0.1° 范围±50° 电压需求 供电电压 :+5 VDC 或者6 to 18 VDC 电流 连续输出模式: <20 mA 空闲模式:18mA 睡眠模式:0.6mA 温度 操作温度: -20° to +70° C 存储温度: -40° to +125° C 接口:RS232C NMEA0183 尺寸:6.4×5.1×1.4cm 重量:20g |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 精度为0.8° 分辨率:0.1° 重复性: ±0.05° 倾斜信息 俯仰精度:±0.2° 横滚精度±0.2° 分辨率:0.1° 重复性: ±50° 范围±90° 电压需求 供电电压 +3.6 to 5 VDC 电流 连续输出模式: <20 mA 空闲模式:18mA 睡眠模式:0.6mA 温度 操作温度: -40° to +85° C 存储温度: -40° to +125° C 接口:RS232C NMEA0183 尺寸:3.5×4.3×1.3cm 重量:12g |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 倾斜 <70°时,精度为0.5° 倾斜 >70°时,精度为0.8° 分辨率:0.1° 重复性: ±0.05° 倾斜信息 俯仰精度:±0.2° 横滚精度 俯仰 <65º 时,为0.2° 倾斜 >80°时,为0.5° 倾斜 <86°时,为1.0° 分辨率:0.1° 重复性: ±0.05° 范围±90° 电压需求 供电电压 +3.6 to 5 VDC 电流 连续输出模式: <20 mA 空闲模式:14-18mA 睡眠模式:0.6mA 温度 操作温度: -40° to +85° C 存储温度: -40° to +125° C 接口:数字式RS232 尺寸:3.5×4.3×1.3cm 重量:12g |
||||
|
资料下载 |
磁感应技术 任何环境下**精度 航向信息 倾斜 <70°时,精度为0.3° 倾斜 >70°时,精度为0.5° 分辨率:0.1° 重复性: ±0.05° 倾斜信息 俯仰精度:±0.2° 横滚精度 俯仰 <65º 时,为0.2° 倾斜 >80°时,为0.5° 倾斜 <86°时,为1.0° 分辨率:0.1° 重复性: ±0.05° 范围 ±90°俯仰 ±180°横滚 电压需求 供电电压 +3.6 to 5 VDC 电流 连续输出模式: <20 mA 空闲模式:14-18mA 睡眠模式:0.6mA 温度 操作温度: -40° to +85° C 存储温度: -40° to +125° C 接口:数字式RS232 尺寸:3.5×4.3×1.3cm 重量:12g |
||||
|
资料下载 |
*款关于无人驾驶车辆经过或通过磁性失真区域时使用的航姿系统 无人驾驶车辆执行的任务日益复杂,这就要求无人驾驶车辆越来越强大、并且要有更准确的航向、方位信息。但现有的航向姿态参考系统模块受到多种因素的影响。当遇到磁性失真时,他们将失去的航向;当运动不规则,他们也可能出错;甚至在一个静态的环境,也不能提供准确的航向。基于MEMS技术的航姿系统价格都*过2000美元,难怪航姿系统只被一小部分客户使用。 新FieldForc Trax AHRS(航姿系统)模块在静态和经过或通过磁性失真区域时能够提供了*的航向精度。PNI把根据PNI*技术设计的参考磁传感器和陀螺与加速度计集成Trax AHRS模块。TRAX AHRS模块采用了卡尔曼滤波算法,巧妙地过滤了由于不稳定运动和磁场变化引起的误差。虽然TRAX面向于商业用途,但它提供的航向信息比成本贵于他两倍的传统AHRS(航姿系统模块)更*。 因此,不管遇到什么情况,TRAX将继续停留在轨道上。 2轴测量 3轴测量 动态运动控制 硬和软磁校正 功耗低 内置微处理器 |
传感器
HONEYWELL(霍尼韦尔)