供应陀螺式磁传感器
地区:北京 北京市
认证:
无
图文详情
产品属性
相关推荐
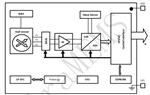
如果您的应用环境包括震动,加速度,颠簸地形,或风浪*大的海面,X W GMAR-01无疑是您的*佳选择,它*过了世界上任何同类产品。GMAR-01在动态环境下提供*经准的航向,横滚,俯仰值。整个产品以一个精准的三轴固态磁力计为基础。两个*的角速率陀螺稳定横滚俯仰值,它们在各种静态环境中为双轴电解倾角计增强*的倾斜测量。两套*的滤波器,一个为横滚,一个为俯仰,把陀螺和电解传感测量融为一体,提供*佳的倾角测量。
我们推荐GMAR-01 应用在无人或有人驾驶的汽车,机器人,气象标,天线定位,平台稳定,轮船导航,挖掘钻探和灌溉器械中。*传感器可在大范围的温度下操作,GMAR-01在*次校准之后就能*其卓越的性能
技术指标
|
性能 |
参数 |
测量值 |
条件 |
|
航向 |
精度 |
± 0.5° rms |
静态,倾斜<35°水平倾斜<60° |
|
重复性 |
± 3.0° |
静态,无滤波 | |
|
带宽 |
28Hz |
*大值,无滤波 | |
|
水平倾斜范围 |
± 80° |
||
|
倾斜范围 |
± 40° |
||
|
横滚俯仰 |
精度 |
± 0.2° |
出场校准 |
|
重复性 |
± 0.2° |
无滤波 | |
|
范围 |
± 40° |
||
|
启动时间 |
0.1S |
陀螺激活 | |
|
电源 |
电流 |
45mA 操作; 15mA 采样; 5 mA 备用 |
典型值 |
|
电压 |
6~30Vdc 未稳压,5Vdc 稳压 |
*小电压4.9Vdc | |
|
环境条件 |
操作温度 |
-25 to 85°C |
|
|
储存温度 |
-50 to 150°C |
||
|
湿度 |
0~90% |
非冷凝 | |
|
机械安装 |
外壳 |
Hammond Mfg1591MFL |
|
|
PC板尺寸 |
1.8"W x 3.0"L x 0.6"H |
||
|
PC板安装 |
4 #4 螺钉, 1.4" x 2.6" 间距 |
||
|
重量 |
4 oz,带壳 |
||
|
接线器 |
6针 RJ12 模具插孔 |
||
|
接口 |
信号类型 |
RS232和RS485 |
|
|
波特率 |
2400, 4800, 9600, 19200, |
||
|
字*格式 |
8数位,无校验,1停止位 |
||
|
输入(出)缓冲尺寸 |
110字*数 |
||
|
输出格式 |
NMEA0183,二进制 |
||
|
输出数据速率 |
每分钟1~1650语句 |
||
|
操作模式 |
连续或取样 |
||
|
角度单位 |
度,*一寸,弧度,16位整数 |
XW GMAR01
星网