概述
PMSA003 是一款基于激光散射原理的数字式通用颗粒物传感器,可连续采集并
计算单位体积内空气中不同粒径的悬浮颗粒物个数,即颗粒物浓度分布,进而换
算成为质量浓度,并以通用数字接口形式输出。本传感器可嵌入各种与空气中悬
浮颗粒物浓度相关的仪器仪表或环境改善设备,为其提供及时准确的浓度数据。
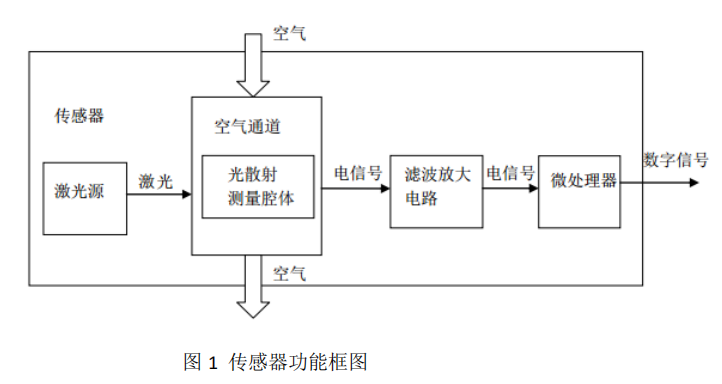
工作原理
本传感器采用激光散射原理。即令激光照射在空气中的悬浮颗粒物上产生散射,
同时在某一特定角度收集散射光,得到散射光强度随时间变化的曲线。进而微处
理器基于米氏(MIE)理论的算法,得出颗粒物的等效粒径及单位体积内不同粒
径的颗粒物数量。传感器的各功能部分框图如图 1 所示
技术指标
如表 1 所示


注 1:量程指本传感器确保 PM2.5 标准值输出数值不小于 1000 微克/立
方米。1000 微克/立方米以上以实测为准。
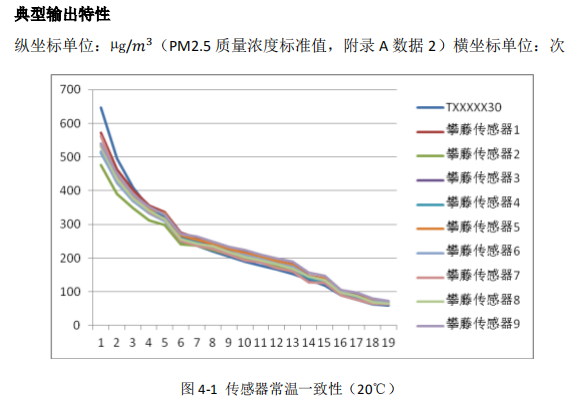
注 2:颗粒物浓度一致性数据为通讯协议中的数据 2(见附录 A)测量环境条件
为 20℃,湿度 50%。
输出结果
主要输出为单位体积内各浓度颗粒物质量以及个数,其中颗粒物个数的单位体积
为 0.1L,质量浓度单位为:微克/立方米。
输出分为主动输出和被动输出两种状态。传感器上电后默认状态为主动输出,即
传感器主动向主机发送串行数据,时间间隔为 200~800ms,空气中颗粒物浓度越
高,时间间隔越短。主动输出又分为两种模式:平稳模式和快速模式。在空气中
颗粒物浓度变化较小时,传感器输出为平稳模式,即每三次输出同样的一组数值,
实际数据更新周期约为 2s。当空气中颗粒物浓度变化较大时,传感器输出自动切
换为快速模式,每次输出都是新的数值,实际数据更新周期为 200~800ms。


电路设计应注意
1. PMSA003 需要 5V 供电,这是因为风机需要 5V 驱动。但其他数据通讯和控
制管脚均需要 3.3V 作为高电平。因此与之连接通讯的主板 MCU 应为 3.3V
供电。如果主板 MCU 为 5V 供电,则在通讯线(TXD、RXD)和控制线
(SET、RESET)上应当加入电平转换芯片或电路。
2. SET 和 RESET 内部有上拉电阻,如果不使用,则应悬空。
3. PIN6 和 PIN8 为程序内部调试用,应用电路中应使其悬空。
4. 应用休眠功能时应注意:休眠时风扇停止工作,而风扇重新启动需要至少
30s 的稳定时间,因此为获得准确的数据,休眠唤醒后传感器工作时间不应
低于 30s。