
YASKAWA/安川MH50Ⅱ 高生产效率多功能工业用机器人
地区:上海 上海市
认证:
无
图文详情
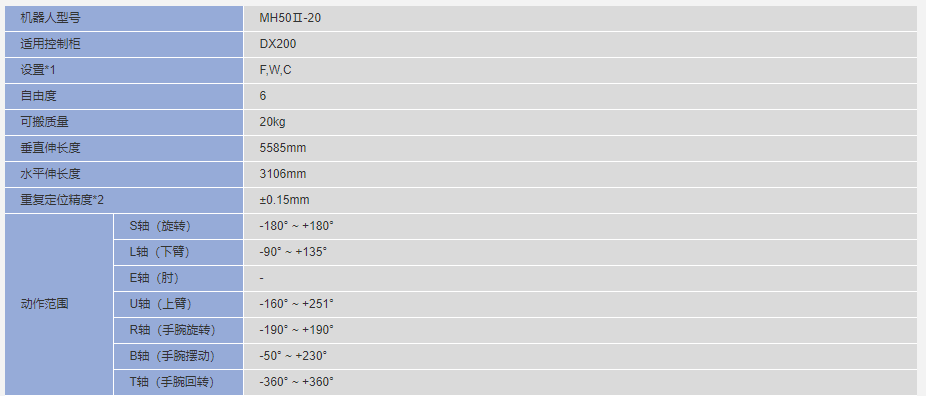
产品属性
相关推荐
| 机器人型号 | MH50Ⅱ | |
|---|---|---|
| 适用控制柜 | DX200 | |
| 设置*1 | F,W,C | |
| 自由度 | 6 | |
| 可搬质量 | 50kg | |
| 垂直伸长度 | 3875mm | |
| 水平伸长度 | 2061mm | |
| 重复定位精度*2 | ±0.07mm | |
| 动作范围 | S轴(旋转) | -180° ~ +180° |
| L轴(下臂) | -90° ~ +135° | |
| E轴(肘) | - | |
| U轴(上臂) | -170° ~ +251° | |
| R轴(手腕旋转) | -360° ~ +360° | |
| B轴(手腕摆动) | -125° ~ +125° | |
| T轴(手腕回转) | -360° ~ +360° | |
| 最大速度 | S轴(旋转) | 180°/s |
| L轴(下臂) | 178°/s | |
| E轴(肘) | - | |
| U轴(上臂) | 178°/s | |
| R轴(手腕旋转) | 250°/s | |
| B轴(手腕摆动) | 250°/s | |
| T轴(手腕回转) | 360°/s | |
| 容许力矩 |
R轴(手腕旋转) |
216N.m |
| B轴(手腕摆动) | 216N.m | |
| T轴(手腕回转) | 147N.m | |
|
容许惯性力矩 (GD2/4) |
R轴(手腕旋转) | 28kg.m2 |
| B轴(手腕摆动) | 28kg.m2 | |
| T轴(手腕回转) | 11kg.m2 | |
|
本体质量 |
550kg | |
| 电源容量*3 | 4.0kVA | |
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:只限搬运用途。
*5:超过1KG的情况因动作范围有异。请根据对应的负载使用正确的动作范围。
*6:MH6F的时候是1.0kVA。
*7:HP20F的时候是1.5kVA。
*8:斜线部分表示的是S轴在-40° ~ +30°的时候P点无法动作的范围。
工业用机器人MH50Ⅱ
YASKAWA/安川
4.0kVA
199630.0
日本ANELVA溅射离子泵912-7165S 60L/S 410575
Mennekes壁盒DUO 7235 IP44固定壁盒壁挂插座63A
6LVV-A61VD2DP-ASAS-NV世伟洛克隔膜阀22-323737-00 1/4 HVCR-F
阿法拉伐气动防混阀 A/S Albuos31 DK-6000 TD.449-006-11315962
马头Desoutter CVI3系列EAD80-650弯头电动拧紧扳手6151656120 75Nm
供应德尔格PSS3600Plus是德尔格的自给式压缩空气呼吸器
供应Bently本特利3500/91 3500/92 3500/93 3500/94通讯网关
DOPAG刀派克高压油脂定量阀401.10.00 401.09.01 CH-6330
美国BARD巴德3Dmax腹股沟疝修补片中号左测用0115310
曼恩DAROS陶瓷活塞环11S90ME SML0380981 30713059 900X15X28MM









