无刷直流电机(BLDC) 取代了交流感应电机,在风扇、空气净化器、洗衣机和烘干机泵以及医用 CPAP 鼓风机等通用电器的应用中变得越来越普遍。
然而,BLDC 电机的调制会产生噪音,这会导致环境背景噪音,尤其是在开放式概念平面规划在办公室和家庭环境中非常流行的情况下。
为了帮助解决这些与噪声相关的问题,德州仪器 (TI)今天宣布推出 两款全新 70 W 无传感器 BLDC 电机驱动器,即MCT8316A和MCF8316A。这些驱动程序声称是高度集成的无代码芯片组,分别使用梯形控制和磁场定向控制(FOC)。

这些新芯片的总体目标有三个:减少来自日常应用的可闻噪声源,将解决方案板尺寸缩小多达 70%,,缩短 BLDC 调谐的总体设计时间(可能缩短至 10 分钟) .
考虑到这些目标,让我们来看看 TI 的产品。
MCT8316A 和 MCF8316A 以通用电气参数运行,包括 4.5 V 至 35 V 的工作范围和高达 8A 的峰值输出。此外,这些芯片专为需要 12 V 至 24 V BLDC 或永磁同步电机的速度控制电机应用而设计。
MCx8316A 驱动器系列的一项决定性功能是降低噪音。具体而言,MCT8316A 支持 120° 和 150° 调制,可通过梯形控制方案改善声学性能。
同时,采用FOC方案的MCF8316A利用自动死区时间补偿来减少馈送到电机的谐波含量,从而降低可听范围内的噪声。
一个家族,两种芯片,两种控制方案,不禁要问,梯形控制和磁场定向控制有什么区别?
有两种一般类型的 BLDC 电机,包括霍尔效应传感器驱动架构和无传感器架构。尽管更复杂,但无传感器架构是更受欢迎的选择。对于无传感器操作,出现了两种控制方案。
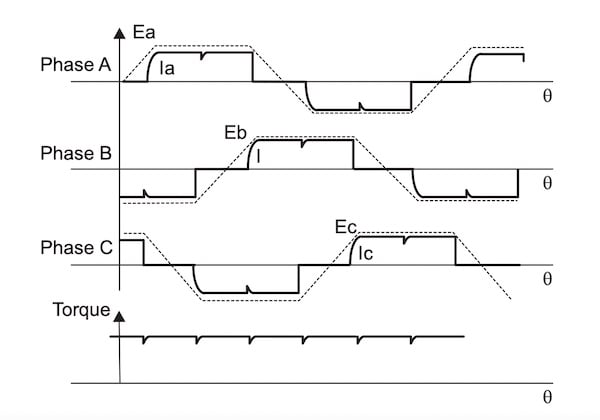
梯形控制的工作原理是在任何给定时间断言两个相位。因此,如上所示,在任何相位的过零期间都不会产生扭矩。
该方案的效果是在每 60° 过零相位处产生纹波,从而产生谐波。在 120° 模式下,BLDC 驱动器将在每个周期的剩余 60° 中使用高阻态。
相反,磁场定向控制方案在反馈控制的转换中需要明显更多的复杂性。
三相逆变器的输出产生一个正弦信号,该信号被采样并通过Clarke 变换然后通过Park 变换进行馈送。
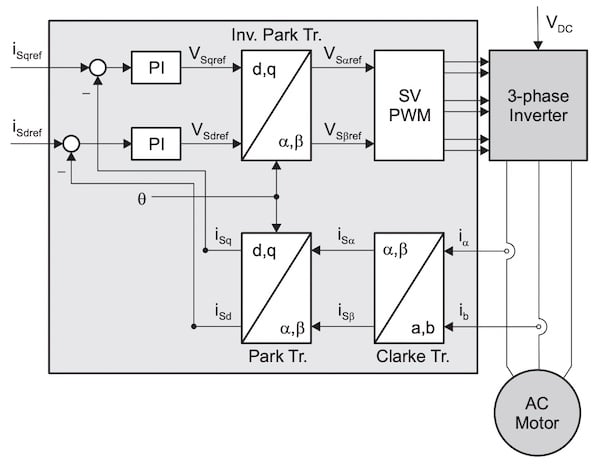
这两个变换的结果通过将定子电流矢量从三相时变系统转换为双坐标时不变系统来实现直接转矩控制。
用于控制 BLDC 电机的两种控制方案各有优缺点。每种方法都会产生有助于声学噪声的谐波伪影。
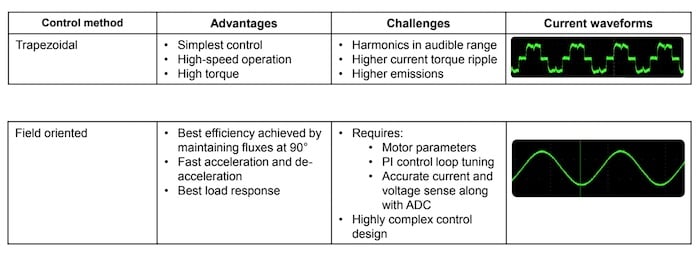
据说调制和死区时间补偿对于减少电机运动中存在的可听噪声至关重要。准确地说,MCF8316A使用谐振控制器补偿高侧和低侧开关 MOSFET 之间的 死区时间,以将谐波含量降至零。
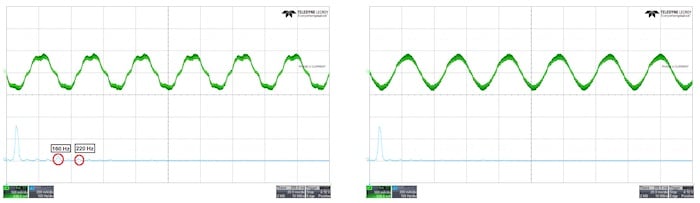
对正弦输出和随后的快速傅立叶变换 (FFT) 的影响如上所示。
类似地,梯形控制方案(如 MCT8316A)的 FFT 响应通过利用芯片的可变换向方案在 120° 和 150° 之间动态切换而得到改善,方法是“窗口化”电机相位处于 Hi-Z 模式的时间量.
总而言之,这种降噪解决方案似乎对许多应用很有前景,尤其是对消费产品而言。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。